DPDK (Data Plane Development Kit)는 고성능 패킷 처리를 위한 오픈 소스 라이브러리 및 드라이버 모음입니다.
여기서는 DPDK의 주요 계층 구조와 핵심 기능들을 살펴보고, 개발자를 위한 분석 팁과 유용한 자료들을 소개합니다.
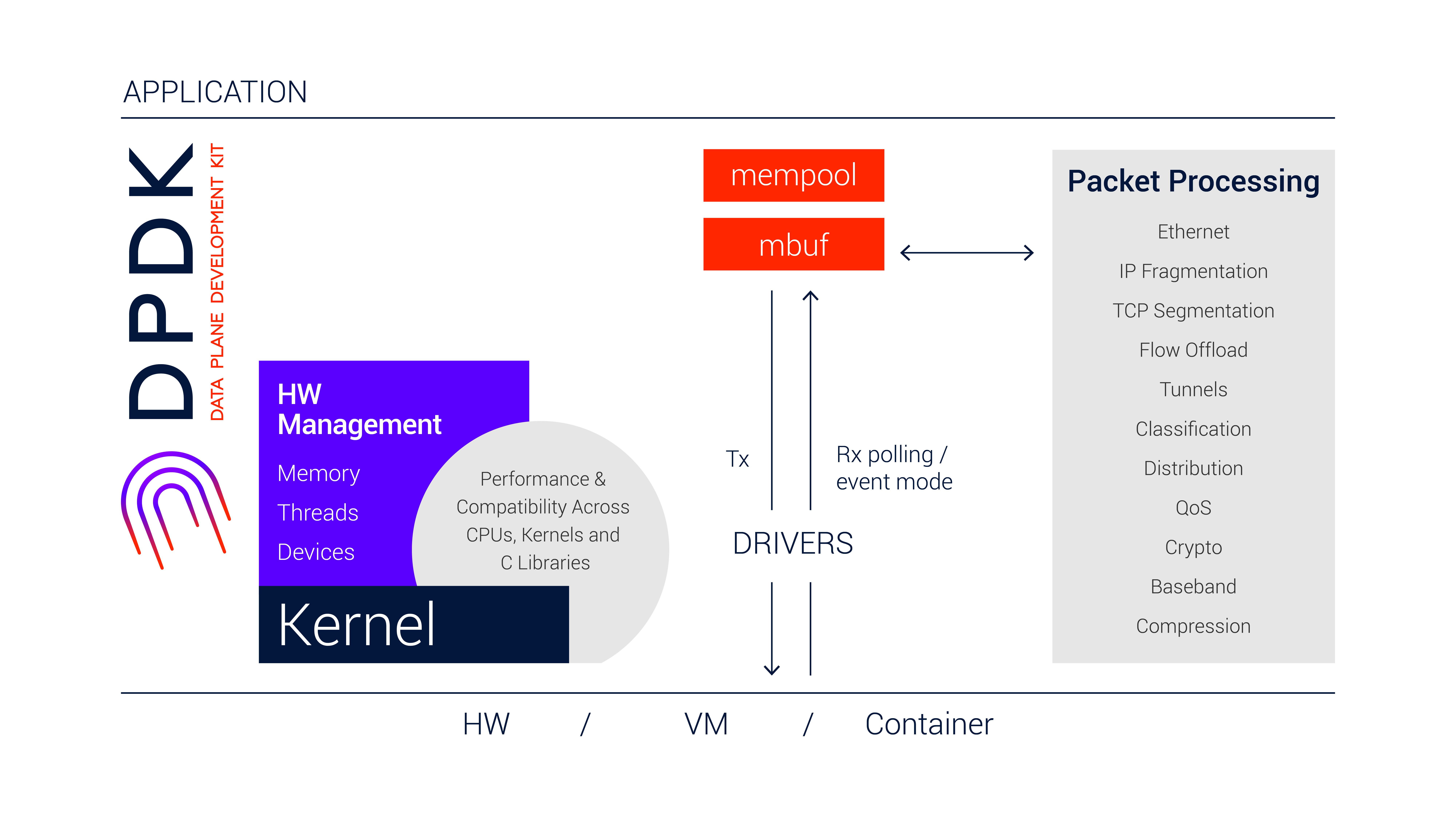
DPDK의 계층별 구조 분석
DPDK는 크게 6개의 주요 계층으로 구성되어 있으며, 각 계층은 특정한 역할을 수행하며 유기적으로 연결되어 고성능 패킷 처리를 가능하게 합니다.
1. Core Layer (핵심 인프라 계층)
가장 기반이 되는 계층으로, 기본적인 실행 환경과 메모리 시스템을 설정합니다. **EAL (Environment Abstraction Layer)**은 rte_eal_init() 함수를 통해 초기화되며, CPU core affinity, NUMA (Non-Uniform Memory Access) 등을 지원하여 최적의 성능을 위한 기반을 제공합니다. 또한, Linux, FreeBSD와 같은 다양한 운영체제 및 플랫폼을 추상화하고, Timer, log, atomic 연산, memory barriers 등의 유틸리티를 제공합니다.
메모리 관리 측면에서는 고정 크기의 메모리 예약 영역인 Memzone (rte_memzone_reserve), 오브젝트 풀 생성 및 관리를 위한 Mempool (rte_mempool_create), 패킷 버퍼 구조체인 Mbuf (rte_pktmbuf_*), 그리고 Lockless 큐인 Ring buffer (rte_ring_create) 등을 제공하여 효율적인 메모리 사용과 빠른 데이터 접근을 가능하게 합니다.
2. Device Layer (드라이버 계층)
다양한 하드웨어 디바이스에 대한 추상화 및 드라이버를 제공하는 계층입니다. Bus Drivers는 PCI, VDEV (Virtual Device) 등을 지원하며, **Poll Mode Drivers (PMDs)**는 인터럽트 방식 대신 폴링 방식을 사용하여 패킷 수신 오버헤드를 줄이고 높은 처리량을 제공합니다. 이더넷 (ethdev: Intel, Mellanox, virtio 등), 암호화 (cryptodev: AESNI, QAT, OpenSSL), 압축 (compressdev: zlib, QAT), 이벤트 처리 (eventdev: hardware/software event scheduler), 머신러닝 추론 (mldev), 그리고 Rawdev, Regex, DMA 등의 다양한 장치를 지원합니다. 관련 디렉토리는 /drivers/, /lib/ethdev, /lib/cryptodev 등이 있습니다.
3. Packet Processing (패킷 처리 계층)
실질적인 패킷 처리 로직을 담당하는 계층입니다. Flow Classification을 위해 rte_flow API를 통해 NIC 하드웨어 오프로드 필터링을 지원하며, ACL (Access Control List), FDIR (Flow Director), Five-tuple filtering 등의 기능을 제공합니다. Lookup & Routing을 위해서는 Hash table, LPM (Longest Prefix Match) 등의 알고리즘을 제공하며, Exact match, LRU caching 등을 지원합니다. 또한, Load Balancing을 위한 RSS (Receive Side Scaling) 및 NIC Queue 관리 기능을 제공하며, IPv4, IPv6, TCP, UDP, IP fragmentation, IPsec, PDCP 등 다양한 Protocol Libraries를 포함하고 있습니다.
4. Scheduling & Frameworks (처리 프레임워크)
패킷 처리 흐름을 제어하고 고수준의 처리 기능을 제공하는 계층입니다. Eventdev는 비동기 이벤트 기반 처리를 통해 멀티큐 환경에 효율적으로 대응할 수 있도록 지원하며, Service Cores를 통해 특정 기능을 별도의 코어에 할당할 수 있습니다. Pipeline Framework를 통해 다단계 처리 그래프를 구성할 수 있으며, Graph API를 통해 DAG (Directed Acyclic Graph) 형태의 처리 플로우를 유연하게 구성할 수 있습니다.
5. Tools & Control (도구 및 제어 인터페이스)
시스템 구성, 디버깅, 성능 측정 등 운영에 필요한 유틸리티를 제공하는 계층입니다. CLI/Configuration을 위한 명령줄 파서 (rte_cmdline)와 runtime 설정 지원 기능을 제공하며, Telemetry API를 통해 소켓 기반으로 시스템 통계를 JSON 포맷 등으로 제공합니다. 주기적인 작업 예약을 위한 Timer (rte_timer), 그리고 디버깅 및 추적을 위한 Tracepoints, log level, PMD logging, DPDK 전용 로그 (rte_log, RTE_LOGTYPE_*) 등의 기능을 제공합니다.
6. Applications & Examples (활용 및 샘플)
DPDK를 활용한 레퍼런스 애플리케이션 및 예제 코드를 제공합니다. 대표적인 예로 다양한 NIC 기능을 테스트할 수 있는 TestPMD, 그리고 L2/L3 패킷 포워딩 예제인 l2fwd, l3fwd 등이 있습니다. 이 외에도 /examples/ 디렉토리에는 IPsec, KNI (Kernel Network Interface), VHOST, VMXNET3 등 다양한 기능의 예제 코드가 포함되어 있습니다. 관련 디렉토리는 /app/, /examples/, /usertools/ 입니다.
개발자를 위한 DPDK 분석 팁
DPDK 기반 개발을 진행하면서 소스 코드를 효과적으로 분석하는 것은 매우 중요합니다. 다음은 DPDK 소스 트리 기반 분석 가이드와 개발 팁입니다.
소스 트리 기반 분석 가이드
- /lib/: 핵심 라이브러리 (eal, mempool, ethdev, hash 등)
- /drivers/: PMD 구현체 (각 NIC 및 장치별 하위 디렉토리)
- /app/: 기본 DPDK 애플리케이션 (testpmd 등)
- /examples/: 기능별 예제 코드
- /doc/: Doxygen 기반 문서
- /usertools/: 스크립트 및 시스템 셋업 도구 (dpdk-setup.sh, dpdk-devbind.py)
개발자 분석 팁
- rte_* API 호출 추적: grep rte_mempool_create, rte_eth_rx_burst, rte_flow_validate 등으로 핵심 흐름을 파악할 수 있습니다.
- MAINTAINERS 파일: 각 모듈 담당자 및 디렉토리 역할을 파악하는 데 유용합니다.
- meson.build: 빌드 대상 모듈 및 라이브러리를 확인하는 데 도움이 됩니다.
이 글에서는 고성능 패킷 처리를 위한 핵심 기술인 DPDK의 주요 계층 구조와 핵심 기능들을 살펴보았습니다. DPDK는 복잡하면서도 강력한 기능을 제공하며, 네트워크 성능 향상을 위한 다양한 가능성을 제시합니다.
참고 링크
- DPDK 공식 문서: https://doc.dpdk.org/guides/
- "Programmer’s Guide"
- "API Reference"
- "Sample Applications"
'Tech. Study > DPDK' 카테고리의 다른 글
| [DPDK] Exploring Source Code: 환경 설정과 빌드 시스템 이해 (0) | 2025.05.03 |
|---|---|
| DPDK Source Tree 정리 (0) | 2025.05.02 |
| DPDK (Data Plane Development Kit) 란 ? (0) | 2019.07.05 |